Kangning YinI’m a Ph.D. student at the Apex Lab at Shanghai Jiao Tong University advised by Professor Weinan Zhang. My research mainly focuses on robotics learning especially on humanoid robots.
Before that, I received my Master's degree from ShanghaiTech University, where I was advised by Professor Email / GitHub / Google Scholar / |

|
ResearchMy research interests lie in humanoid robot control, navigation, character animation, 3D human motion generation and motion retrieval. My long-term goal is to bring humanoid robots into everyday life. '*' indicates equal contribution. |
|
Towards Adaptable Humanoid Control via Adaptive Motion TrackingTao Huang, Huayi Wang, Junli Ren, Kangning Yin*, Zirui Wang, Xiao Chen, Feiyu Jia, Wentao Zhang, Junfeng Long, Jingbo Wang, Jiangmiao Pang ICRA, 2026 webpage / arxiv / paper / code / |
|
Unveiling the Impact of Data and Model Scaling on High-Level Control for Humanoid RobotsYuxi Wei, Zirui Wang, Kangning Yin , Yue Hu, Jingbo Wang, Siheng Chen ICRA, 2026 arxiv / paper / |
|
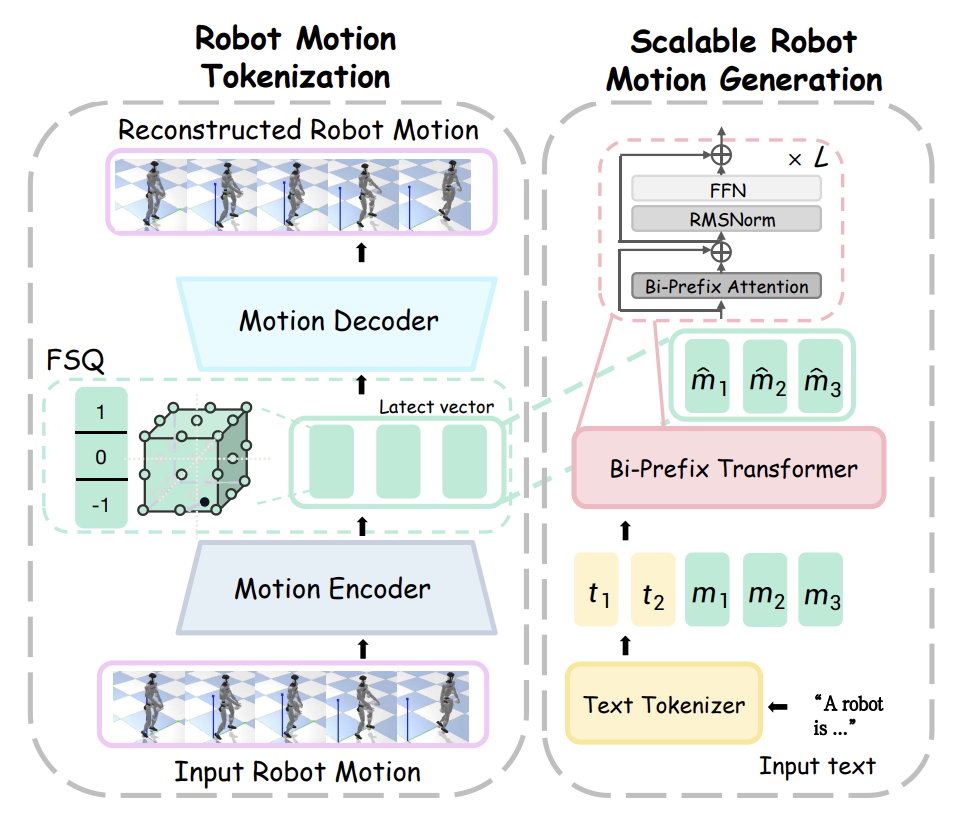
Behavior Foundation Model for Humanoid RobotsWeishuai Zeng, Shunlin Lu, Kangning Yin, Xiaojie Niu, Minyue Dai, Jingbo Wang, Jiangmiao Pang ICRA, 2026 webpage / arxiv / paper / |
|
|
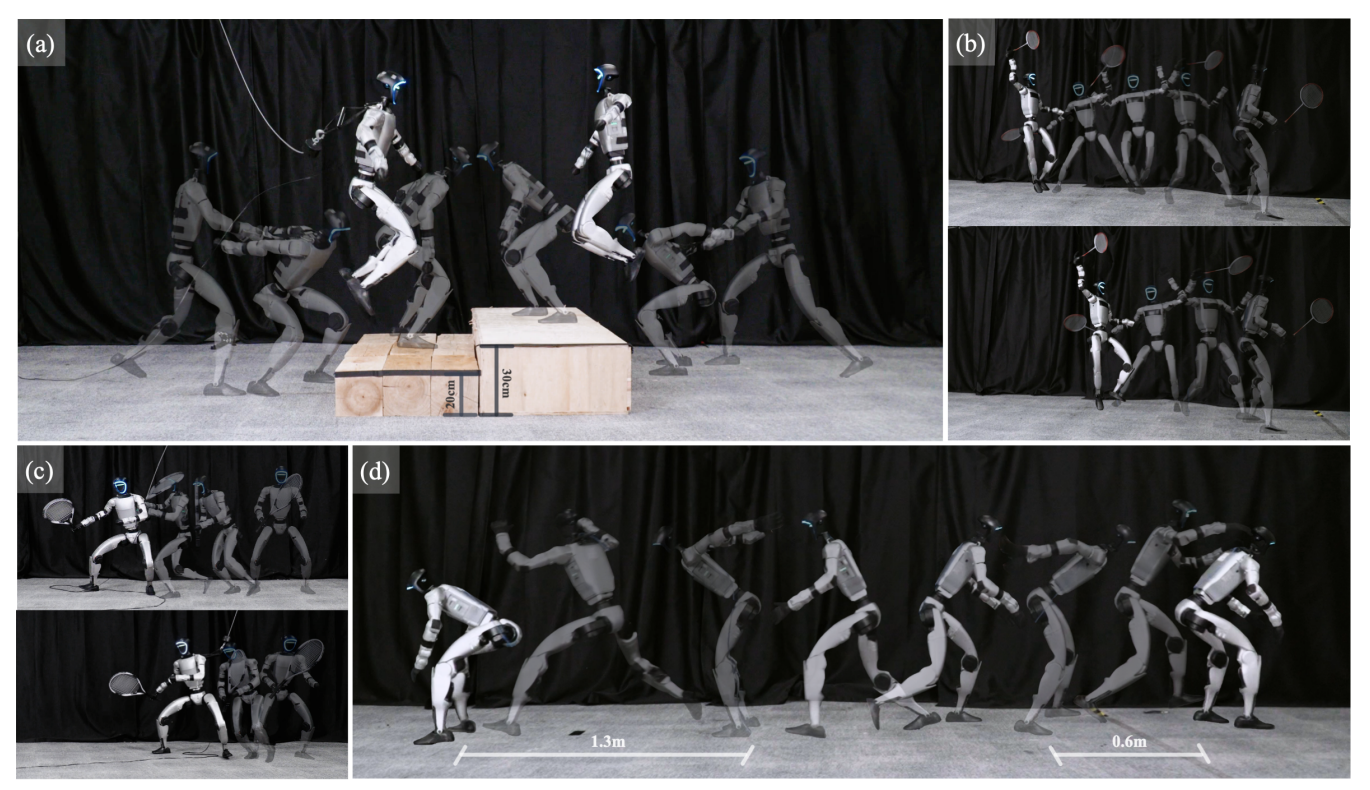
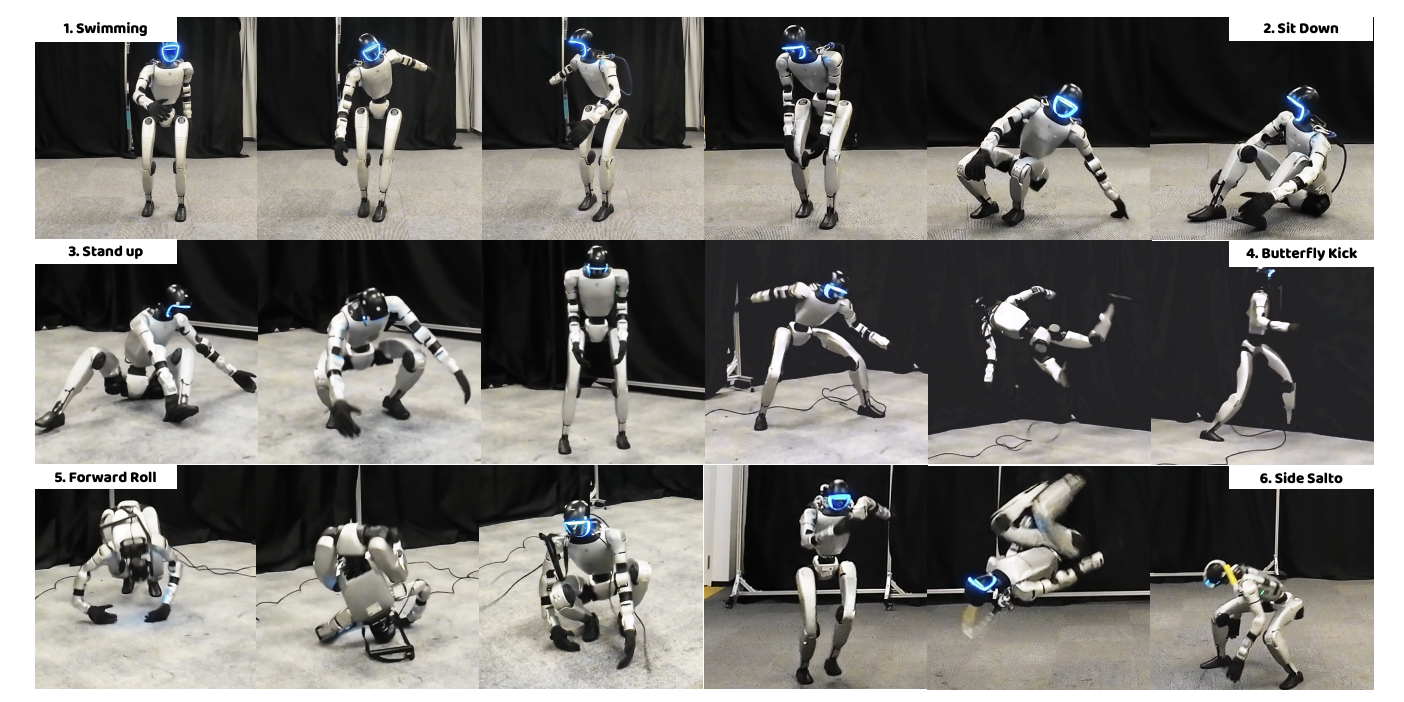
UniTracker: Learning Universal Whole-Body Motion Tracker for Humanoid RobotsKangning Yin*, Weishuai Zeng*, Ke Fan, Zirui Wang, Qiang Zhang, Zheng Tian, Jingbo Wang, Jiangmiao Pang, Weinan Zhang RAL, 2026 webpage / arxiv / paper / |
|
Multi-Modal Motion Retrieval by Learning a Fine-Grained Joint Embedding SpaceShiyao Yu, ZiAn Wang, Kangning Yin, Zheng Tian, Mingyuan Zhang, Weixin Si, Shihao Zou IEEE TMM 2025 (JCR Q1), 2025 arxiv / |
|
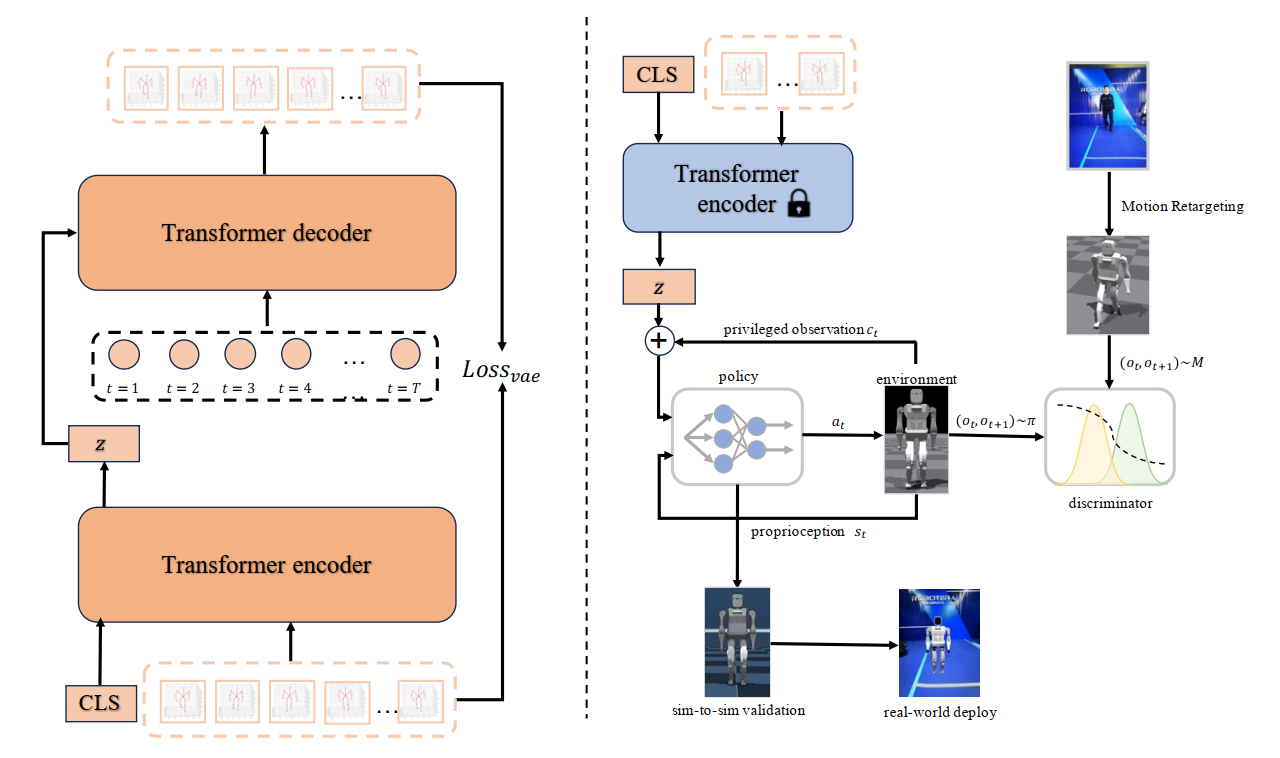
Agile Humanoid Locomotion by Learning from Human DemonstrationsKangning Yin, Yingguang Xing , Yao Mu, Jianyu Chen, Zheng Tian Under Review, 2025 paper / video / |
|
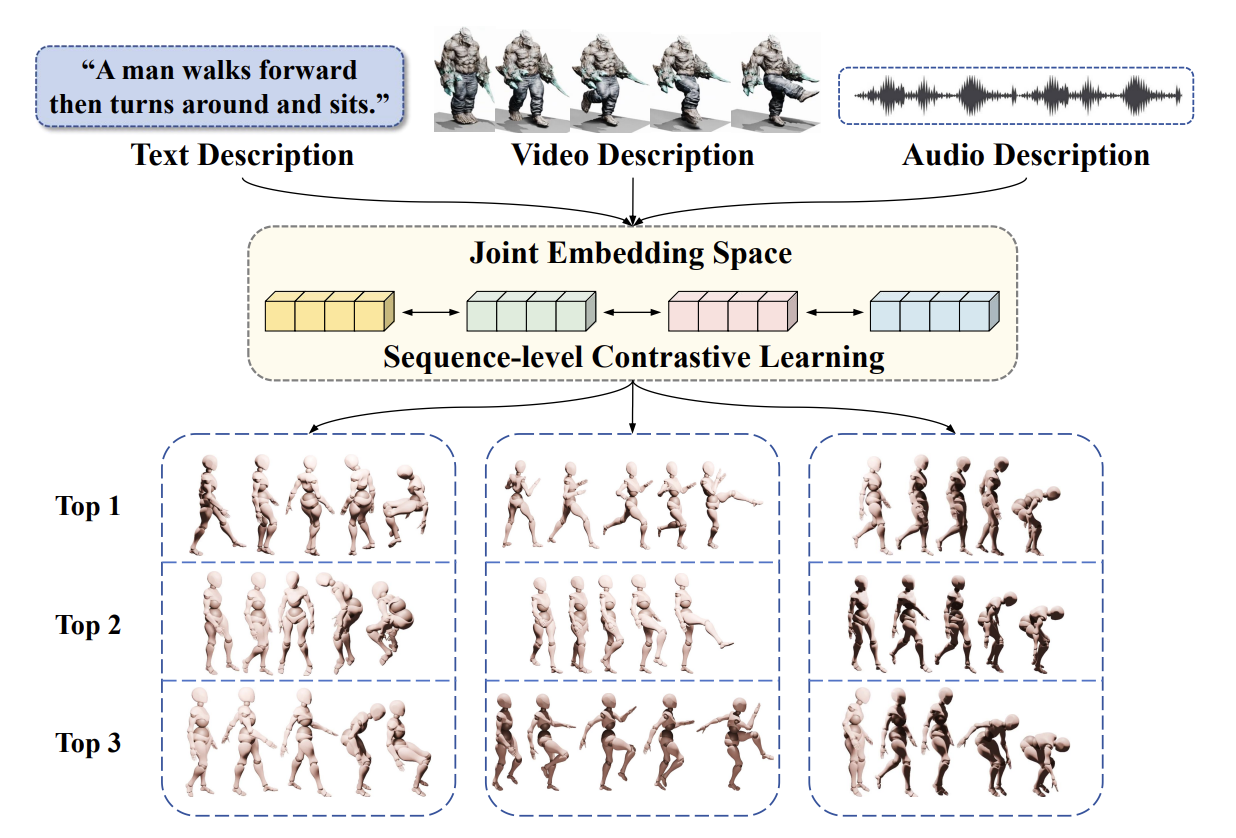
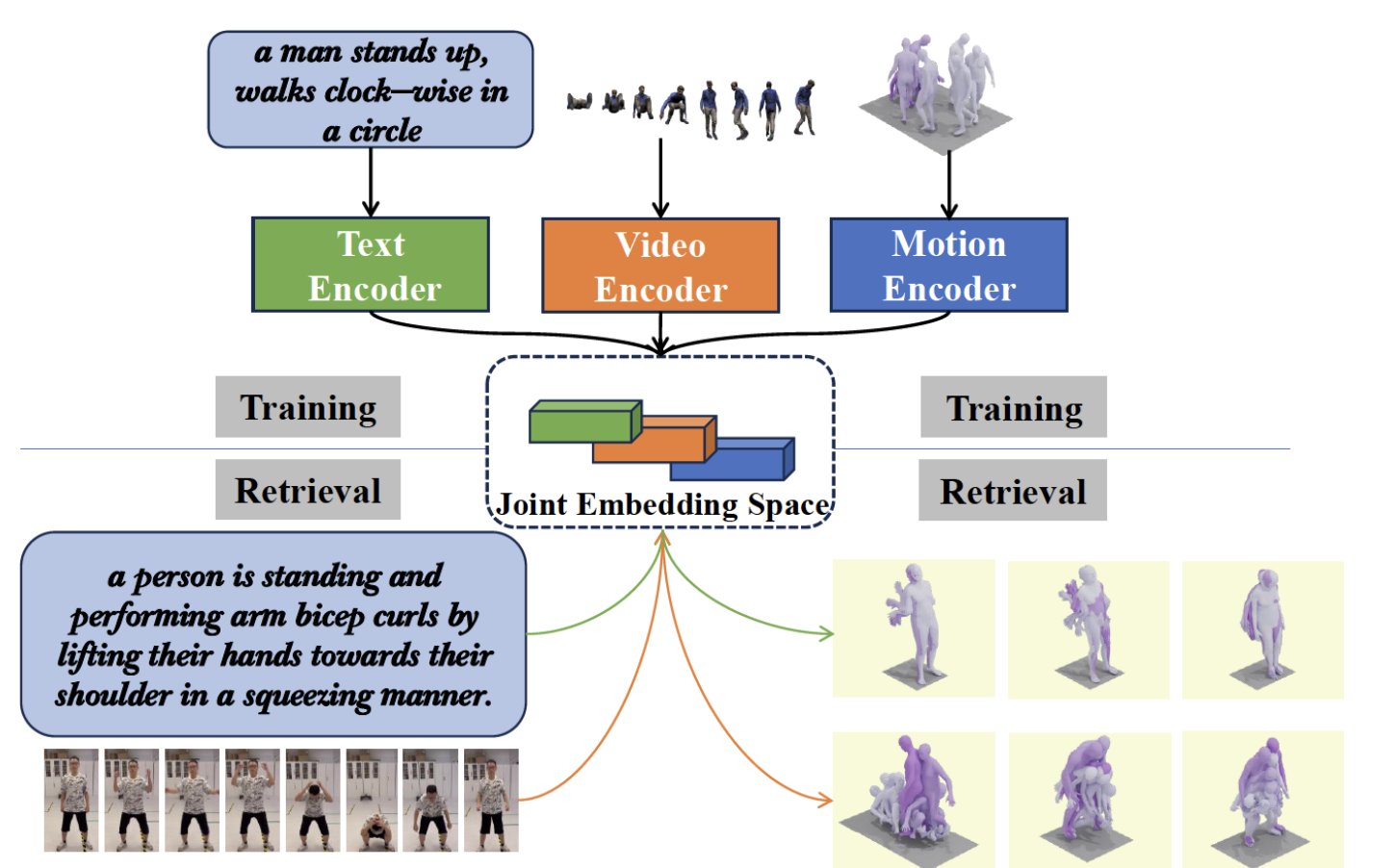
Tri-Modal Motion Retreival by Learning a Joint Embedding SpaceKangning Yin, Shihao Zou, Yuxuan Ge , Zheng Tian CVPR (Highlight), 2024 webpage / arxiv / paper / |
|
RACon: Retrieval-Augmented Simulated Character Locomotion ControlYuxuan Mu, Shihao Zou, Kangning Yin, Zheng Tian, Li Cheng, Weinan Zhang, Jun Wang ICME (Oral), 2024 arxiv / |
|
Design and source code from Leonid Keselman's website |